 平台热线
平台热线





C=电机轴连接到负载的机械钢度
JL/JM=额定负载惯量/转子惯量
Kvp = p-gain velocity control
E-Filter=Time constant for error filter
O-Filter=Time constant output filter
Kpp= p-gain position control
z i-gain velocity control(速度环积分增益 Kvi)
使用电机的编码器分辨率增加 i-gain velocity control 数值减小,如使用 8000 分辩率编码器
Kvi 设置为 1,使用高分辨率编码器时应设置为 0.1。
注: i-gain velocity control 的可选数值为 0 或 1,当小于 1 时 i-gain velocity control 设置为 0,
在 i2-gain velocity control 中设置具体参数。
z i2-gain velocity control(专为高分辨率编码器设置的速度环积分增益 Kvi)
单位选择为 1/256 时, i2-gain velocity control 数值等于 i-gain velocity control 数值。
单位选择为 dec 时, i2-gain velocity control 乘以 256 为 i-gain velocity control 数值。
例: i-gain velocity control 数值要设定为 0.1 时
i-gain velocity control=0; i2-gain velocity control=0.1( 1/256)
或 i-gain velocity control=0; i2-gain velocity control=26( dec)
z Max.velocity 根据实际需要计算。
二、励磁( communication)
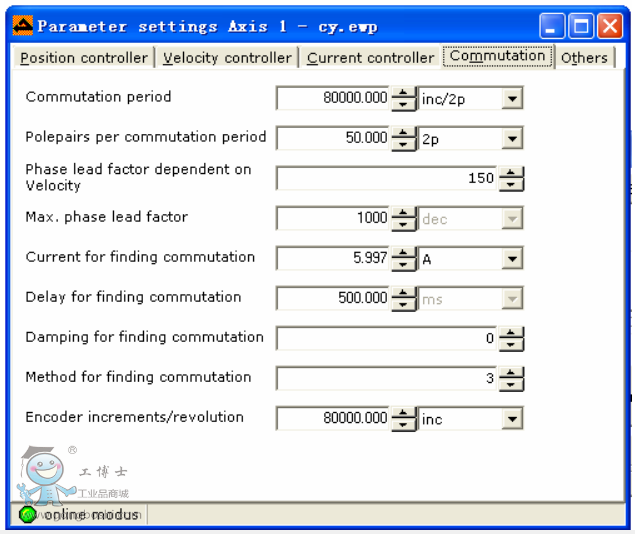
z Commutation period(励磁周期)电机编码器的分辨率
例:编码器分辨率是 80000inc/rec, Commutation period 设置为 80000。
z Polepairs per commutation period 电机的极对数
z Phase lead factor dependent on velocity 根据电机型号、动力电源电压和应用情况确定,
参考伺服驱动器使用手册。
z Max .phase lead factor 80000inc/rec 分辨率伺服电机设定值为 600。
z Current for finding commutation 感应电流,要小于电机的额定电流
z Delay for finding commutation,标准 500ms
z Damping for finding commutation 降低找原点期间偏移量
z Method for finding commutation 参照使用手册
z Encoder increments/revolution 两个 Z 信号之间的 A 脉冲个数。
例:编码器分辨率是 80000inc/rec, Encoder increments/revolution 设置为 80000。
注
1. 其他详细参数设置请参考伺服驱动器手册。
2. 设置完参数后,请保存并重新启动。
3. 驱动器必须接屏蔽线,屏蔽网与电机及驱动器连接。
本说明适用于以下电机:
23S21-0560-808N7-AA
23S21-0560-808N7-AA-K
23S31-0650-808N7-AA
23S31-0650-808N7-AA-K
23S41-0650-808N7-AA
23S41-0650-808N7-AA-K
34S42-0560-A08NA-AA
34S42-0560-A08NA-AA-K
34S80-0850-A08NA-AA
34S80-0850-A08NA-AA-K
34S90-0850-A08NA-AA
34S90-0850-A08NA-AA-K
42S90-1400-A08NA-AA
42S90-1400-A08NA-AA-K
